Finalitza el projecte europeu SARAS, cap a la robòtica cognitiva en cirurgia
La Dra. Alicia Casals, investigadora del Institut de Recerca Sant Joan de Déu · CREB-UPC, ha col·laborat en el projecte Europeu SARAS (Smart Autonomous Robot Assistant Surgeons), que busca desenvolupar una plataforma robòtica quirúrgica que permeti disminuir el número de cirurgians per una operació.
A finals d'aquest any, acaba el projecte europeu SARAS (Smart Autonoums Robot Assistant Surgeons), desenvolupat pel consorci integrat per la Universitat de Verona, Universitat de Modena, Universitat de Ferrara, Ospedale San Raffaele de Milà, Universitat de Dundee, Universitat de Brookes, Medineering Surgical Robotics i ACMIT Austrian Center i la UPC, a través del grup de robòtica i visió del CREB.
Actualment, moltes operacions quirúrgiques requereixen que diverses unitats de personal mèdic es quedin a quiròfan per donar suport al cirurgià principal. Els assistents, que solen ser cirurgians experts, sempre han d'estar presents per fer-se càrrec de procediments senzills que el cirurgià principal no pot realitzar perquè està teleoperant. Per tant, tenint en compte el cost horari d'un cirurgià, la pràctica actual és molt ineficient des del punt de vista econòmic però també des del punt de vista social, provocant llargues llistes d'espera innecessàries.
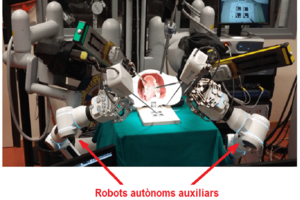
Per fer front a aquesta situació, va néixer el 2018 el projecte SARAS, que tenia com a objectiu combatre aquesta ineficiència mitjançant el desenvolupament d'un sistema de control d'uns robots auxiliars, dotats d'autonomia, que permetessin assistir al cirurgià en cirurgia robòtica per teleoperació. D'aquesta manera, els robots podien suplir les tasques auxiliars que normalment fa un cirurgià assistent. Mentre la cirurgia la realitza pròpiament el cirurgià principal, el poder alliberar un cirurgià assistent de la tasca rutinària i poc activa dels braços auxiliars necessaris durant la cirurgia, evitarà mal aprofitar l'expertesa i les capacitats d'aquests professionals.
Aconseguir aquest objectiu implica que els robots auxiliars han de conèixer el procediment quirúrgic bàsic i poder interpretar en cada moment en quina fase del procés s'està per poder decidir quina actuació d'assistència cal en front l'actuació del cirurgià principal. Per exemple, aquests ajuts poden ser del tipus apartar un òrgan o aguantar una agulla de sutura.
Col·laboració de l'IRSJD·CREB-UPC al projecte SARAS
Durant aquests quatre anys, la tasca de l'equip liderat per la Dra. Alicia Casals, Tecnologies mèdiques: Robòtica i Visió de l'Institut de Recerca Sant Joan de Déu, ha sigut verificar l'efectivitat assolida en un camp quirúrgic sintètic, efectuant una prostatectomia radical o extracció de la pròstata. La feina ha comportat modelitzar el procediment, establir les regles d'actuació i efectuar la tasca d'integrar-ho en la plataforma #DaVinci Research Kit, una plataforma de robot quirúrgic teleoperat orientat a la recerca en tècniques d'assistència robòtica en cirurgia.
Els resultats han estat molt positius tot i que encara queda un gran impuls per generalitzar la pràctica en altres cirurgies i fer el salt al mercat, futurs objectius del consorci finançat pel programa Horizon 2020 Research and Innovation.
Font d'informació
El CREB en el projecte SARAS, cap a la robòtica cognitiva en cirurgia. CREB-UPC.
El projecte SARAS busca desenvolupar una plataforma robòtica quirúrgica que permeti disminuir el número de cirurgians per una operació.
